


服务支持
下载中心
我们为您提供最新的产品资讯,欢迎您随时通过我们的网页浏览或下载产品目录。
选型计算
故障排除
|
现象 |
可能问题 |
解决措施 |
|
电机不转 |
电源指示灯不亮 |
检查供电电路,确认电源正负极极性连接正确,电源线连接可靠 |
|
细分太小 |
选对细分 |
|
|
电流设定是否太小 |
选对电流 |
|
|
驱动器已保护 |
重新上电,不能解决,参照报警指示灯亮项描述 |
|
|
使能端电平为高 |
控制驱动侧使能端口的电平为低或使之悬空 |
|
|
不能响应控制信号 |
提升控制信号幅度,使控制信号高低电平时间都符合说明书描述 |
|
|
电机转向错误 |
电机线接错 |
两相任意交换电机同一相的两根线(例如A+,A-交换接线位置),三相UVW中任意调换两相 |
|
报警指示灯亮 |
电机线短路 |
检查并接对 |
|
电机线接错 |
检查接线 |
|
|
电压过高或过低 |
检查电源 |
|
|
电机或驱动器损坏 |
更换电机或驱动器 |
|
|
位置不准 |
信号受干扰 |
排除干扰 |
|
屏蔽地未接或未接好 |
可靠接地 |
|
|
电机线有断路 |
检查并接对 |
|
|
细分错误 |
设对细分 |
|
|
电流偏小 |
加大电流 |
|
|
脉冲方向时序不对 |
更改脉冲有效沿 |
|
|
电机与负载连接处松动 |
考虑连接固定方式是否合理 |
|
|
电机加速时堵转 |
加速时间太短 |
加速时间加长 |
|
电机扭矩太小 |
选大扭矩电机 |
|
|
电压偏低或电流太小 |
适当提高电压或电流 |
|
|
电机轴与负载不同心 |
改变电机轴与负载相对位置使其同心 |
|
|
电机抖动 |
绕组不对称 |
检查电机接线 |
|
驱动器或电机故障 |
更换驱动器或电机 |
|
|
转速处于共振点 |
避开共振点使用 |
|
|
折算到电机轴的负载惯量与转子惯量比超过5 |
选择大惯量电机或合理的减速比来控制惯量比尽量小 |
|
|
机壳漏电 |
驱动器、电机没有可靠接保护地 |
驱动器、电机可靠接地 |
混合伺服系统常见故障处理方法
|
错误代码 |
错误内容 |
可能问题 |
解决措施 |
|
ER001 |
过流报警 |
电机接线错误 |
按正确接线方式接线 |
|
电机绕组烧坏 |
更换电机 |
||
|
驱动器故障 |
更换驱动器 |
||
|
ER002 |
过压报警 |
电压过高 |
更换正常电源 |
|
驱动器故障 |
更换驱动器 |
||
|
ER020 |
缺相报警 |
电机线松脱 |
重新接紧 |
|
缺编码器 |
编码器线松脱 |
重新接紧 |
|
|
跟踪误差超差保护 |
编码器线接错 |
按顺序接线 |
|
|
电机相序错 |
按相序规定颜色对应接线 |
||
|
编码器故障 |
更换电机 |
||
|
驱动器故障 |
更换驱动器 |
||
|
位置不准 |
同步进 |
同步进 |
交流伺服系统常见故障处理方法
|
错误代码 |
错误内容 |
错误原因 |
处理方式 |
|
Er090-09F |
FPGA通讯错误 |
r,t端电压过低。 |
确保r,t端电压在合适的范围内。 |
|
驱动器内部故障。 |
退我司维修。 |
||
|
Er0R0-0R1 |
电流检测回路错误 |
电机输出U、V、W端子接线错误。 |
确保电机输出U、V、W端子接线正确。 |
|
主电压R、S、T端子上电压是否过低。 |
确保R、S、T端子电压在合适范围。 |
||
|
驱动器内部故障。 |
退我司维修。 |
||
|
Er0R2-0R4 |
模拟量输入回路错误 |
模拟量输入接线错误。 |
确保模拟量输入接线正确。 |
|
驱动器内部故障。 |
退我司维修。 |
||
|
Er0R5 |
直流母线回路错误 |
主电压R、S、T端子上电压过低。 |
确保R、S、T端子电压在合适范围。 |
|
驱动器内部故障。 |
退我司维修。 |
||
|
Er0R6 |
温度检测回路错误 |
r,t端电压过低。 |
确保r,t端电压在合适的范围内。 |
|
驱动器内部故障。 |
退我司维修。 |
||
|
Er060 |
控制电源电压过低 |
控制电源供电电压低。 |
增大r、t端子上供电电压;牢固 r、t端子接线。 |
|
电源容量不足,受主电源冲击影响,电压下降。 |
提高r、t端子上供电电源的供电容量。 |
||
|
驱动器故障。 |
退我司维修。 |
||
|
Er0c0 |
直流母线电压过高 |
主电源输入电压过高。 |
减小R、S、T端子上供电电压; |
|
内部制动电路损坏。 |
退我司维修。 |
||
|
驱动器故障。 |
退我司维修。 |
||
|
Er0d0 |
直流母线电压过低 |
主电源输入电压过低。 |
增大R、S、T端子上供电电压;牢固端子接线。 |
|
驱动器故障。 |
退我司维修。 |
||
|
Er0E0 |
过电流 |
驱动器输出短路。 |
确保驱动器输出线未短路;确保电机未损坏。 |
|
电机接线异常。 |
调整电机的接线顺序。 |
||
|
IGBT模块短路异常。 |
断开驱动器输出线,使能Srv_on并驱动电机,如果驱动器仍过流退我司维修,如果驱动器不报过流则检查电机接线。 |
||
|
控制参数设定异常。 |
将参数调整到合适范围。 |
||
|
控制命令设定异常。 |
调整控制命令;开启滤波。 |
||
|
Er0E1 |
智能功率模块(IPM)过流 |
驱动器输出短路。 |
确保驱动器输出线未短路;确保电机未损坏。 |
|
电机接线异常。 |
调整电机的接线顺序。 |
||
|
IGBT模块短路异常。 |
断开驱动器输出线,使能Srv_on并驱动电机,如果驱动器仍过流退我司维修,如果驱动器不报过流则检查电机接线。 |
||
|
IGBT模块欠压异常。 |
退我司维修。 |
||
|
控制参数设定异常。 |
将参数调整到合适范围。 |
||
|
控制命令设定异常。 |
调整控制命令;开启滤波。 |
||
|
Er0F0 |
驱动器过热 |
驱动器功率器件的温度超过上限值。 |
加强散热条件;提高驱动器、电机容量;增大加、减速时间;降低负载。 |
|
Er100 |
电机过载 |
负载过重。 |
减小负载;调整限制参数。 |
|
机械系统振荡。 |
修改控制增益参数;增大加、减速时间。 |
||
|
电机、编码器接线错误。 |
调整接线;更换编码器/电机。 |
||
|
电磁制动器动作。 |
断开制动器。 |
||
|
Er120 |
电阻泄放回路过载 |
再生能量超出泄放极限。 |
降低电机转速;减小负载惯量;增加外部再生电阻;提高驱动器、电机容量。 |
|
泄放电路损坏。 |
增加外部再生电阻;更换新的驱动器。 |
||
|
Er150 |
编码器断线 |
编码器断线。 |
牢固编码器接线。 |
|
编码器接线错误。 |
纠正编码器接线错误。 |
||
|
编码器损坏。 |
更换新的电机。 |
||
|
编码器测量电路损坏。 |
更换新的驱动器。 |
||
|
Er152 |
编码器初始化位置错误 |
通讯数据异常。 |
确保编码器电源电压正常5V±5%;确保编码器线缆完好;确保编码器线缆的屏蔽层与FG地接触良好;确保编码器线缆与强电线缆分开布线。 |
|
编码器损坏。 |
更换新的电机。 |
||
|
编码器测量电路损坏。 |
更换新的驱动器。 |
||
|
Er170 |
编码器数据出错 |
通讯数据异常。 |
确保编码器电源电压正常5V±5%;确保编码器线缆完好;确保编码器线缆的屏蔽层与FG地接触良好;确保编码器线缆与强电线缆分开布线。 |
|
编码器损坏。 |
更换新的电机。 |
||
|
编码器测量电路损坏。 |
更换新的驱动器。 |
||
|
Er180 |
位置误差过大错误 |
位置误差参数设置不合理。 |
增大参数PA_014的数值。 |
|
增益设置过小。 |
增大参数PA_100、PA_105的数值。 |
||
|
扭矩限制过小。 |
增大参数PA_013、PA_522的数值。 |
||
|
外部负载过大。 |
减小加、减速时间过快;降低转速;减轻负载。 |
||
|
Er181 |
速度误差过大错误 |
内部位置指令速度与实际速度偏差过大。 |
增大参数PA_602数值;将参数PA_602设置为0使位置偏差过大检测无效。 |
|
内部位置指令速度的加、减速时间太短。 |
增大PA_312、PA_313数值;调整速度控制相关增益,提高追随性。 |
||
|
Er1R0 |
超速 |
电机的速度超过第一速度限制值。 |
调整输入速度指令大小;增大参数PA_321数值;修改指令脉冲的输入频率和分频系数;确保编码器接线正确。 |
|
Er210 |
I/F输入端口分配错误 |
信号重复设置。 |
确保正确设置参数PA_400、PA_401、PA_402、PA_403、PA_404。 |
|
信号未设置。 |
确保正确设置参数PA_400、PA_401、PA_402、PA_403、PA_404。 |
||
|
Er211 |
I/F输入端口功能设定错误 |
信号分配错误。 |
确保正确设置参数PA_400、PA_401、PA_402、PA_403、PA_404。 |
|
Er212 |
I/F输出端口功能设定错误 |
信号重复设置。 |
确保正确设置参数PA_410、PA_411、PA_412、PA_413。 |
|
信号未设置。 |
确保正确设置参数PA_410、PA_411、PA_412、PA_413。 |
||
|
Er240 |
EEPROM参数保存时CRC校验错误 |
r、t端电压过低。 |
确保r、t端电压在合适范围。 |
|
驱动器损坏。 |
更换新的驱动器。 |
||
|
Er260 |
正/负超程输入有效 |
正/负超程输入信号导通。 |
检查正/负超程输入信号状态。 |
|
Er570 |
强制报警输入有效 |
强制报警输入信号导通。 |
确保输入信号接线正确。 |
常见问题


如果是第一次使用我司混合伺服,先检查电机线和编码器反馈线是否松脱或接错,电机线A+,A-,B+,B-(U,V,W)一定要按颜色顺序接线,同时一定要使用编码器延长线。接着排查负载部分是不是有卡死或运行不顺畅的情况。(掉电后用手推负载是否顺畅)再检查电机是否力不够。(拆下负载皮带或者拆下电机空转看能否正常运行,能运行说明电机力不够需要更换更大的电机或者降低高速度和加速度)。
如果驱动器运行一段时间超差报警,先检查机械结构是否运行顺畅,再检查线是否松脱,最后用替换法检查编码器线、电机、驱动器是否损坏。
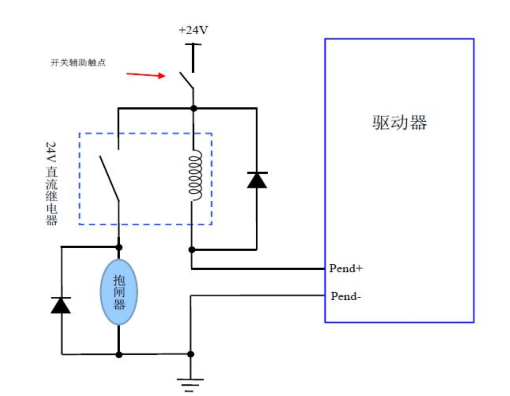
继电器参考接线如下图,由于抱闸线圈和继电器线圈均是感性负载,建议加上二极管,二极管型号可选择普通整流二极管(如:IN4007)另外,二极管极性切不可接反。建议客户使用固态继电器,就无需加二极管,固态继电器优点:响应速度快,无需加二极管,通断不会发出声音;推荐使用“凯泽”的 KS1-10DD 型号固态继电器。
HBS758/HBS1108/HBS2206可以通过面板监控d03反馈脉冲数。机械工作原点记录d03,一直运行到出现偏位,机器再回工作原点,对比d03,d04的高位和低位数据。如果d03数据不相同,证明电机产生了偏位,采取措施如下:将pr18从0→1,驱动器接地,脉冲±接驱动器端并接103电容以消除干扰,若d03高地位数据均相同,则电机未偏位,此时应检查机械结构同步轮或者连轴器螺丝有没有拧紧。对于HBS507,HBS806没有面板显示的驱动器则需要采取上面的全部措施。